Phát hiện và theo bám phương tiện đường thủy dựa trên mô hình YOLO11n cải tiến và ByteTrack
DOI:
https://doi.org/10.54939/1859-1043.j.mst.CSCE9.2025.111-122Từ khóa:
Phát hiện tàu; Theo bám tàu; YOLO11n; SEAM; CCFM; ByteTrack.Tóm tắt
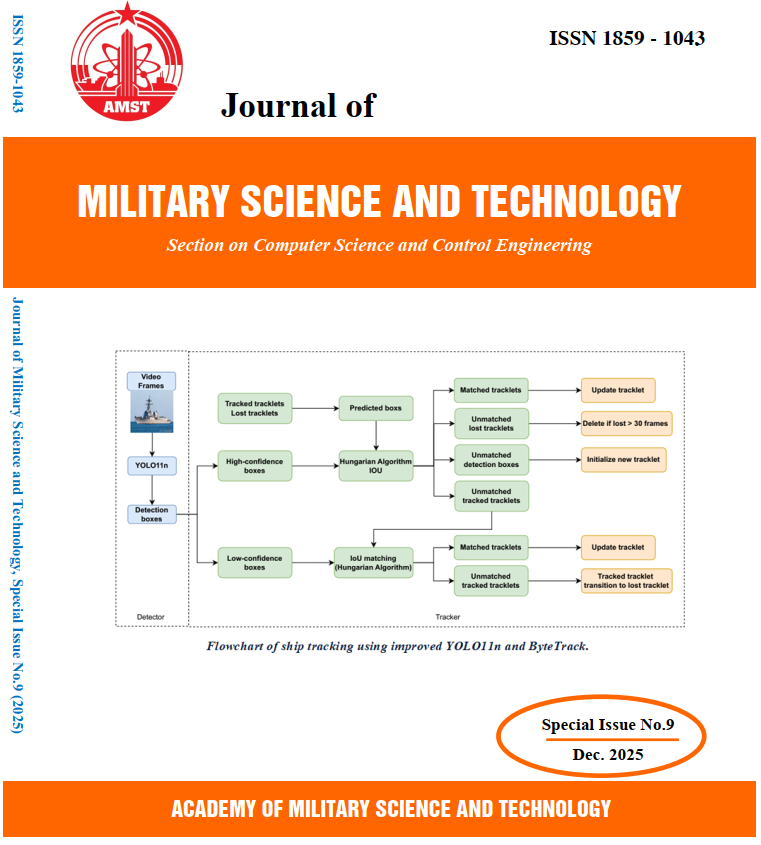
Phát hiện và theo dõi tàu là những thành phần then chốt trong các hệ thống giám sát hàng hải và ven biển thông minh. Nghiên cứu này giới thiệu một phương pháp mạnh mẽ để phát hiện đa lớp tàu và theo dõi trong thời gian thực. Phương pháp tiếp cận này cải tiến mô hình YOLO11n bằng cách tích hợp Mô-đun Chú ý Tách biệt và Tăng cường (SEAM) cùng Mô-đun Hợp nhất Kênh Chéo quy mô (CCFM) vào phần cổ (neck) của mạng, giúp tăng cường khả năng tổng hợp đặc trưng đa quy mô và sự chú ý vào các cạnh. Kết quả thực nghiệm cho thấy chỉ số mAP50 tăng từ 94,26% lên 94,84% và mAP50–95 tăng từ 69,59% lên 70,40% trên bộ dữ liệu tàu tự xây dựng. Kích thước mô hình chỉ tăng nhẹ, trong khi tốc độ suy luận thời gian thực vẫn duy trì ở mức 25 FPS trên thiết bị Jetson Xavier NX. Một bộ dữ liệu tùy chỉnh bao gồm hơn 7.600 hình ảnh được dán nhãn thủ công đã được phát triển, bao gồm sáu loại tàu: tàu hàng, tàu khách, tàu quân sự, thuyền buồm, thuyền cá và tàu tuần tra. Hình ảnh được thu thập từ nhiều kho lưu trữ công cộng khác nhau để đảm bảo sự đa dạng về kích thước tàu, góc nhìn, nền và điều kiện ánh sáng. Hệ thống hoàn chỉnh tích hợp YOLO11n đã được cải tiến với thuật toán ByteTrack để phát hiện và theo dõi tàu trong thời gian thực.
Tài liệu tham khảo
[1]. Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.; Berg, A., “SSD: Single Shot MultiBox Detector”, In Proceedings of the European Conference on Computer Vision (ECCV), pp. 21–37, (2016).
[2]. H. V. Anh, “Tên sách”, NXB Khoa học Kỹ thuật, tr. 11–23, (2005).
[3]. Girshick, R.; Donahue, J.; Darrell, T.; Malik, J., “Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation”, In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 580–587, (2014).
[4]. Ren, S.; He, K.; Girshick, R.; Sun, J., “Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks”, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 39, No. 6, pp. 1137–1149, (2017).
[5]. He, K.; Gkioxari, G.; Dollár, P.; Girshick, R., “Mask R-CNN”, In Proceedings of the IEEE International Conference on Computer Vision (ICCV), pp. 2980–2988, (2017).
[6]. Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J., “YOLOX: Exceeding YOLO Series in 2021”, arXiv preprint arXiv:2107.08430, (2021).
[7]. Redmon, J.; Farhadi, A., “YOLO9000: Better, Faster, Stronger”, In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 6517–6525, (2017).
[8]. Redmon, J.; Farhadi, A., “YOLOv3: An Incremental Improvement”, arXiv preprint arXiv:1804.02767, (2018).
[9]. Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y. M., “YOLOv4: Optimal Speed and Accuracy of Object Detection”, arXiv preprint arXiv:2004.10934, (2020).
[10]. Meituan, “YOLOv6: A High-Performance Object Detection Model”, GitHub Repository, (2022).
[11]. Wong, R.; Chien, Y., “YOLOv7: A Scalable and Efficient Object Detection Model”, GitHub Repository, (2022).
[12]. Zhang, Y.; Sun, P.; Jiang, Y.; Yu, D.; Weng, F.; Yuan, Z.; Luo, P.; Liu, W.; Wang, X., “ByteTrack: Multi-Object Tracking by Associating Every Detection Box”, In Proceedings of the European Conference on Computer Vision (ECCV), pp. 1–21, (2022).
[13]. Shao, Z.; Wang, L.; Wang, Z.; Du, W.; Wu, W., “SeaShips: A Large-Scale Precisely Annotated Dataset for Ship Detection”, IEEE Transactions on Multimedia, Vol. 20, No. 10, pp. 2593–2604, (2018).
[14]. Liu, J et al., “Vehicle Flow Detection and Tracking Based on an Improved YOLOv8n and ByteTrack Framework”, World Electric Vehicle Journal, Vol. 16, No. 1, Article 13, (2024).
[15]. Wang, J.; Zhang, Y.; Li, H.; Zhou, X., “An Efficient Ship-Detection Algorithm Based on the Improved YOLOv5”, Electronics, Vol. 12, No. 17, Article 3600, (2023).
[16]. Wang, L.; Liu, Y.; Zhang, H.; Chen, Z., “Ship Detection Algorithm Based on YOLOv5 Network Improved with Lightweight Convolution and Attention Mechanism”, Algorithms, Vol. 16, No. 12, Article 534, (2023).
[17]. Gao, Y.; Li, Z.; Wang, X.; Sun, Y., “A Lightweight Anti-Unmanned Aerial Vehicle Detection Method Based on Improved YOLOv11”, Drones, Vol. 9, No. 1, Article 11, (2024).
[18]. Huang, J.; Li, Y.; Wang, Q.; Chen, X., “LW-YOLO11: A Lightweight Arbitrary-Oriented Ship Detection Method Based on Improved YOLO11”, Sensors, Vol. 25, No. 1, Article 65, (2024).