ĐIỀU KHIỂN XE HAI BÁNH CÂN BẰNG SỬ DỤNG BỘ ĐIỀU KHIỂN PI BỀN VỮNG VÀ LQR
595 lượt xemDOI:
https://doi.org/10.54939/1859-1043.j.mst.66A.2020.1-15Từ khóa:
Chỉnh định PID; Xe hai bánh; Điều khiển động cơ; Thời gian xác lập.Tóm tắt
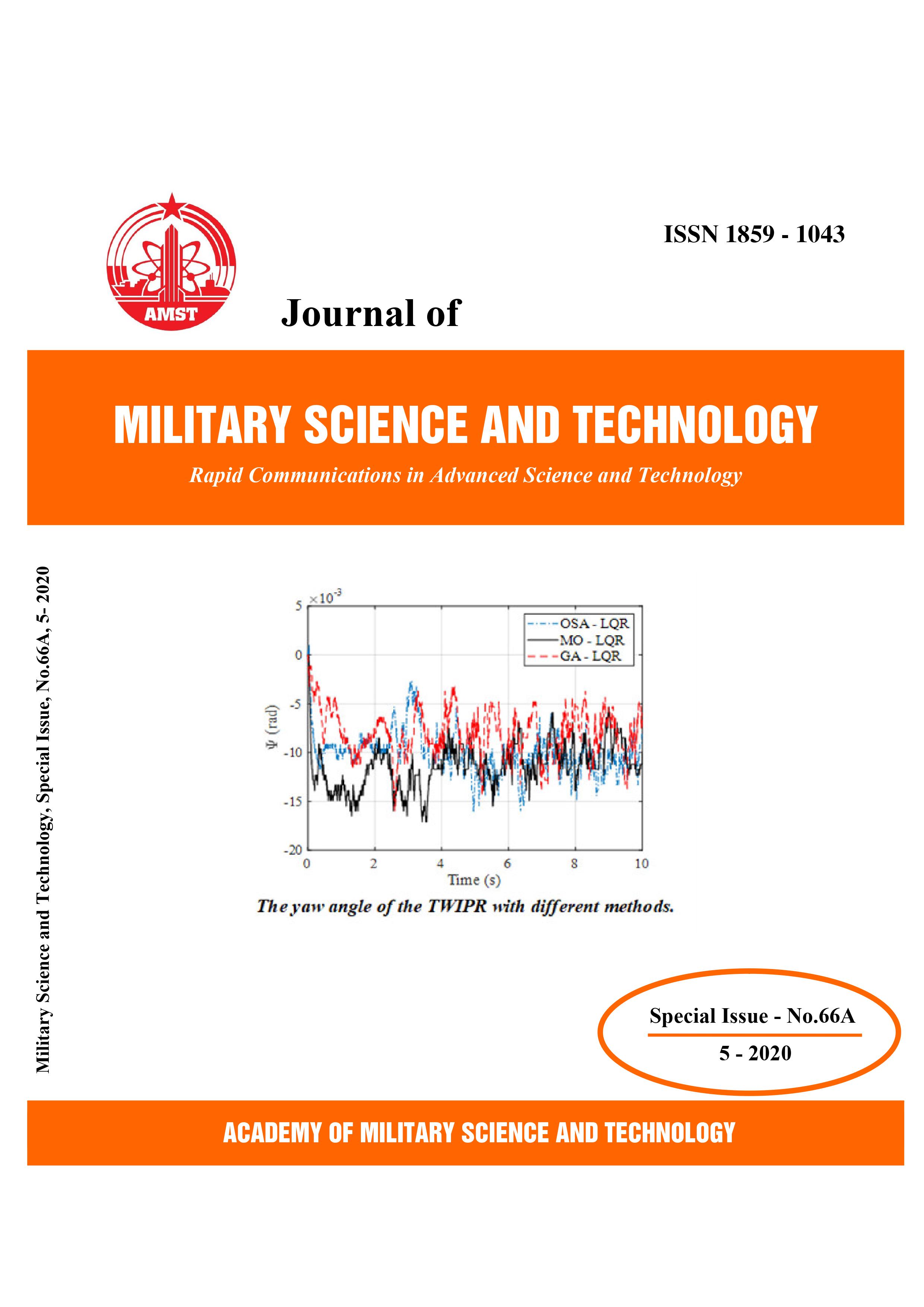
Trong bài báo này, một bộ điều khiển PI bền vững kết hợp với bộ điều khiển LQR được đề xuất để điều khiển xe hai bánh sao cho xe thằng bằng khi di chuyển. Hệ thống điều khiển gồm hai vòng. Vòng trong có hai bộ điều khiển dòng PI để điều khiển dòng động cơ một chiều, được thiết kế riêng sử dụng cấu trúc PI bền vững. Vòng ngoài có bộ điều khiển LQR cho góc nghiêng, góc hướng và vị trí xe. Phương pháp thiết kế bộ điều khiển PI đề xuất được so sánh với phương pháp tối ưu độ lớn và giải thuật di truyền. Cấu trúc điều khiển đề xuất được kiểm chứng thông qua mô phỏng và thực nghiệm, và nó được so sánh với các phương pháp MO-LQR và GC-LQR.
Tải xuống
Đã Xuất bản
06-05-2020
Cách trích dẫn
[1]
Nguyen Hoai Nam, “ĐIỀU KHIỂN XE HAI BÁNH CÂN BẰNG SỬ DỤNG BỘ ĐIỀU KHIỂN PI BỀN VỮNG VÀ LQR”, J. Mil. Sci. Technol., số p.h 66A, tr 1–15, tháng 5 2020.
Số
Chuyên mục
Nghiên cứu khoa học





