CONTROL OF TWO-WHEELED INVERTED PENDULUM ROBOT USING ROBUST PI AND LQR CONTROLLERS
759 viewsDOI:
https://doi.org/10.54939/1859-1043.j.mst.66A.2020.1-15Keywords:
PID tuning; DC motor control; Settling time; Overshoot; Two-wheeled inverted pendulum.Abstract
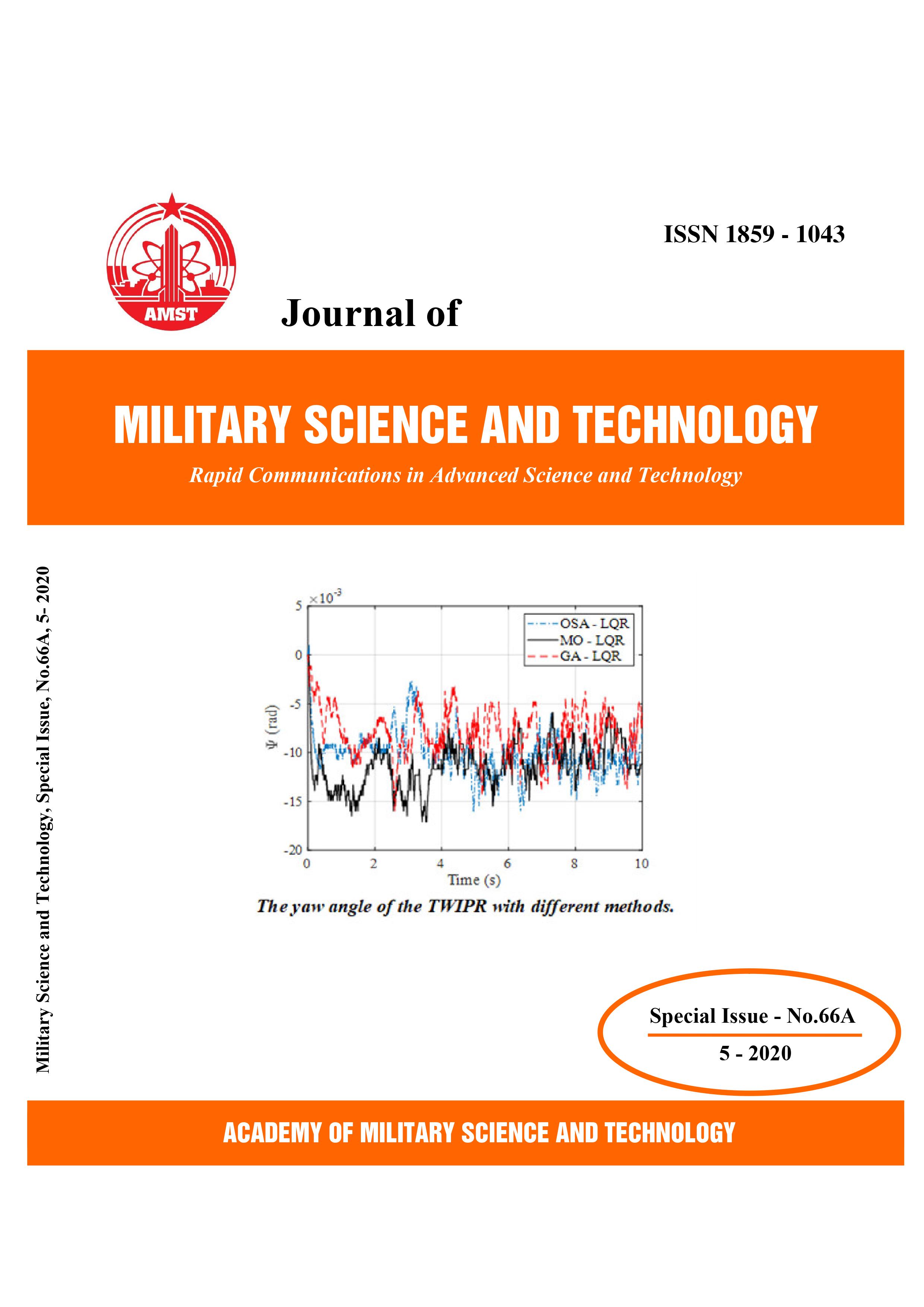
In this paper, a robust PI controller in combination with a linear quadratic regulator (LQR) is proposed to control a two-wheeled inverted pendulum robot (TWIPR) such that it is kept balanced while moving. The proposed TWIPR control system consists of two control loops. The inner loop has two PI controllers for two DC motors’ currents, which are separately designed based on a robust PI controller structure. The outer loop contains a LQR controller for the tilt angle, heading angle and position of the TWIPR. The proposed PI controller is compared to the existing method such as the magnitude optimum (MO) and genetic algorithm (GA) methods. The proposed control scheme is verified through simulations and practical tests, and it is also compared to the MO-LQR and GA-LQR strategies.